
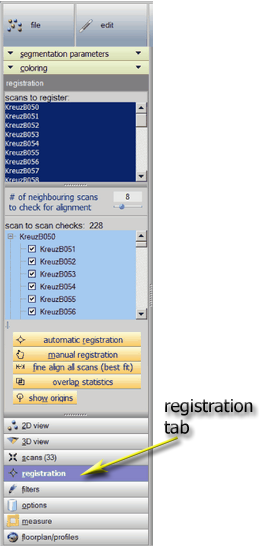
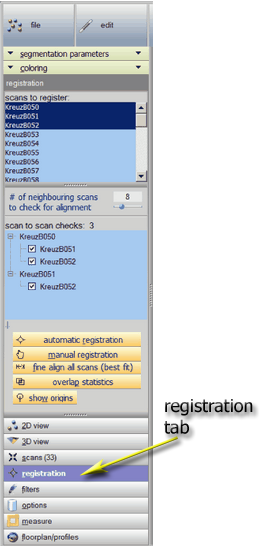

Points3D starts aligning with the best matching scan pair and tries to fit the other scans to this first scan pair. This creates a first group of scans. If there are scans leftover not fitting into this group, a new group is opened with the next best matching scan pair- and so on until all scans are assigned to a group or definitely are not assignable without breaking plausibility rules, i.e.failed. Subsequent transformations to a group member will be applied to all other members of the group, that is, manually aligning 2 groups requires only the matching of 2 scans.
The right popup of the top listbox offers possibilities to edit the groups:
- undo/redo – last group action,
- remove from group – to remove selected scans from a group,
- new group – selected scans create a new group,
- clear grouping – deletes all current groups,
- show/hide group – shows/hides the group under the cursor.

- Click the red up/down arrows icon to switch upper/lower image,
- The red left/right icon switches between the original colors and the index-image, indices represented in false colors,
- Red target icon to return to default autozoom center state,
- Mouse wheel zooms in/out,
- Right mouse button to pan an image,
- Left mouse button to pan the whole viewer,
- Mouse move shows the scan name and current index at the cursor in the bottom status bar,
- Double click the top caption to enlarge/restore the image viewer,
- Double click into an image selects a scan surface segment and depicts it in green.
- see: 1.0 Automatic and manual registration demo movie to see how to use the viewer as a tool for manual registration.
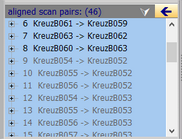 the treeview shows individual scanpairs. Directly matched pairs are displayed in black, not directly matched but both scans aligned in gray, error pairs in red. Use this treeview to check the correctness of the individual alignments. Use the left arrow button at the topright to toggle between this treeview and the scan to scan checks. Down button to inverse sorting of the pairs.
the treeview shows individual scanpairs. Directly matched pairs are displayed in black, not directly matched but both scans aligned in gray, error pairs in red. Use this treeview to check the correctness of the individual alignments. Use the left arrow button at the topright to toggle between this treeview and the scan to scan checks. Down button to inverse sorting of the pairs.


 3.1 Treeview panel
3.1 Treeview panel
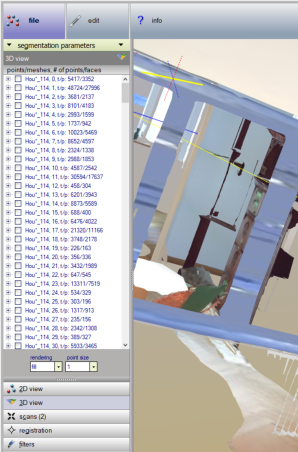
The 3D view shows a treeview on the left displaying the meshed surfaces. The treeview items show the scan’s filename first, limited to 8 characters (if the filename is longer, a ‘*’ is placed into the middle), followed by the surface’s sorting index, i.e. area. Appended is the number of triangle faces.
Subitems display some properties of the surface:
- N, the normal,
- area,
- surrounding rectangle, which may be visualized when checked (displays as well N at CP3D and the convex hull),
- number of faces and vertices,
- the surface centerpoint CP3D.
Selected surfaces are shown in a turquoise color. For meshed surfaces the rendering dropdown offers different visualisations (fill, mesh, points – i.e. the vertex points). For pointclouds the size of the points maybe varied with the point size dropdown.
3.3 3D View popup
Rightclick the treeview or the 3D Viewer to show its popup.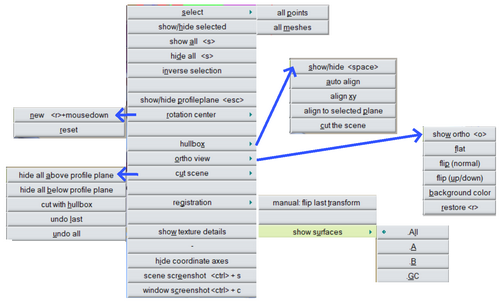
- select all points: select all pointclouds transferred
from the 2D View - select all meshes: all triangulated surfaces (to deselect all: click on the treeview where no item is present),
- show/hide will also check/uncheck the corresponding treeview items,
- show all, hide all, shortcut s key,
- show/hide profileplane, shortcut esc key,
- rotation center, shortcut r, to place a new pivot point,
- hullbox
- autoalign: aligns to the main axes of the scans,
- align xy: aligns to the coordinate system,
- align to selected plane,
- cut the scene: cut off all parts outside the hullbox
- ortho view
- show ortho o, scans are displayed along the normal of the profileplane and aligned to the screen x/y,
- flat: flattens all points to the ortho plane used,
- flip (normal): flips the normal of the ortho plane, i.e front/back,
- flip (up/down): 180° rotation,
- background color: select a custom color,
- restore r: return to last 3D state.
- cut scene,
- hide all above/below profileplane: cuts all meshes above/below the profileplane,
see movie 6: cutting a scene with the profileplane
below, - cut with hullbox: cut off all parts outside the hullbox,
- restore the cutted scene with undo last/all.
- hide all above/below profileplane: cuts all meshes above/below the profileplane,
- registration, items only enabled when registration tab is active.
- flip last transform, in manual mode: invert last transformation,
- show surfaces: show walls A/B, grounds and ceilings individually.
- load textuture details: load and switch to textured mode
- hide coordinate axes in case a screenshot without coordinates is needed
- screenshot, 3D scene or whole window to clipboard, the image is also saved to the \images\-subfolder of the programs current location.
4.1 Scans treeview
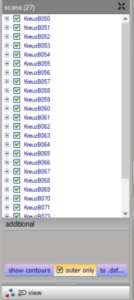
Multiple scans maybe loaded: “file/load 3D file..” and select multiple files. The loaded scans are displayed as items in the scans treeview. Checking/unchecking items shows/hides the scans in the 3D view. Selecting a scan item shows the scan in turquoise color. The subitem shows the number of all triangles for the scan. Use the treeview’s right popup to show/hide all/selected scans or remove selected scans. The additional panel allows to display the contour polylines of the visible surfaces. Individual faces may be selected with the show/hide feature of the Scans/3D-view treeview. The outer only checkbox filters inner (isles) contours. The shown polylines may be exported to a *.dxf file via the to .dxf button.
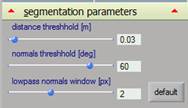
 5.0 Filter indices sliders
5.0 Filter indices sliders
allows to limit the displayed faces to a certain range (indices are sorted along the faces areas).
5.1 Demirror
Use the demirror filter to remove annoying, unappealing mirrored parts of scans. For the automatic registration, those parts are not only unappealing, they can be real game stoppers for scans with many mirrors or glass fronts. Click the demirror scans button to automatically demirror all visible scans. Edit and save the demirrored scans. See movie 4 below.
6.4 Single profile
Move the profileplane to a location where  you want to take a profile of the visible scene,
you want to take a profile of the visible scene,
i.e. a cut of the profileplane with the scene. Check extrapolate for edge hits within the right drop-out pane to extrapolate the profile-polylines – this is for easier detection of corners (see animation below).
The right drop-out pane offers editing some properties of the profile lines. Check “move lines with profile plane” to place the lines at a more convenient point (i.e. use the profiles for a floorplan without skirting boards). The “connect lines” button automatically connects close lines.



 6.5 Autocreate profile series
6.5 Autocreate profile series
Place the profileplane as described above, move it with CTRL + ALT + mousemove and watch the dst-slider to find the range. Edit the from, to and step values accordingly, click start. Points3D will generate a series of profilelines separated by the step value. The limit angle-slider filters out surfaces with an angle (surface.normal vs. profileplane.normal) smaller than that value. The slider controls level/contour lines of parallel surfaces. Setting it to zero allows to depict irregularities of surfaces. see movie 8 below. Check single profile/right drop-out pane/extrapolate for edge hits to extrapolate the polylines for edges. After creating a profile series, you may check/uncheck the project profilelines-box to project all lines onto the profileplane and back again. Export the lines with the “to .dxf… -button.
8.1 Measurement
Points3D offers some basic 3D measurement. Follow the instructions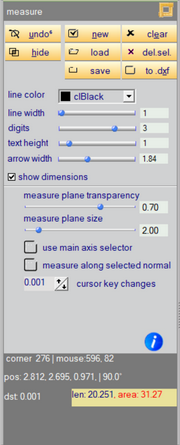 on the measure tab to start 3D measuring. The gray display shows in the first row the last intersected mesh object and the mouse values, in the 2nd row the xyz values of the last mouse intersection point and the angle to the last selected object’s normal, in the 3rd row the distance from the last marked polygon point (blue sphere) to the last mouse intersection point (red sphere), and, on the buttonstyle pane, the overall polygon length.
The 4th row finally shows the distance along the normal (when holding down the CTRL + SHIFT keys) and any hit distances with other mesh objects – see movie 9 below. These values are also reflected on the status bar. The size of the pointing spheres and polygon nodes maybe adjusted with the pointing spheres radius- slider.
The undo-button removes the last polygon node. Press the clear-button to clear the measurement.
on the measure tab to start 3D measuring. The gray display shows in the first row the last intersected mesh object and the mouse values, in the 2nd row the xyz values of the last mouse intersection point and the angle to the last selected object’s normal, in the 3rd row the distance from the last marked polygon point (blue sphere) to the last mouse intersection point (red sphere), and, on the buttonstyle pane, the overall polygon length.
The 4th row finally shows the distance along the normal (when holding down the CTRL + SHIFT keys) and any hit distances with other mesh objects – see movie 9 below. These values are also reflected on the status bar. The size of the pointing spheres and polygon nodes maybe adjusted with the pointing spheres radius- slider.
The undo-button removes the last polygon node. Press the clear-button to clear the measurement. The model tab offers: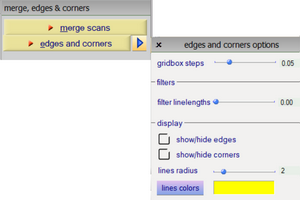
- merge scans: merges the overlaps (duplicates) of all visible scans giving a more homgenous presentation and reducing the number of triangles by the overlap factors. For best accuracy, triangles discarded are determined by their distance to the scan origins. Having no doublettes certainly makes measurements more easy and preciser.
- edges and corners: automatically detect edges and corners of visible scans. It creates a gridbox and expands the gridbox lines for intersections. Set the grid box steps within the right drop-out pane, where also some properties of the result may be edited.



